Recession Relativity
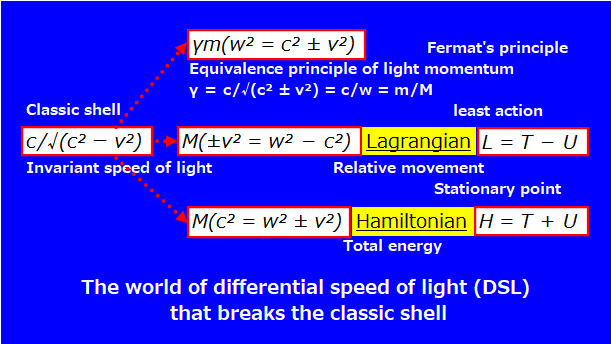
Abstract Galileo made relativity between objects a principle. On the other hand, Einstein proposed the principle of invariance between a viewpoint and an object by light. Classical mechanics remains ambiguous as to what the observer is relativing. ± Relative motion velocity = Object velocity - Observer velocity. Absolute time ➔ Relative time. ± Relative motion velocity² = Relative wave speed² - c² . In absolute time, relative motion is derived from the motion between objects, but in relative time it is derived from the speed of light and relative waves. This article proposes a Easy and Exact relativity in Everything that removes the "strange contradictions" that Einstein says have lurked in theoretical physics from the beginning. Introduction Einstein uses spherical waves to explain the principle of invariant speed of light. The equations of the Lorentz transformation may be more simply deduced directly from the condition that in virtue of ...